第一章 绪论
1、简述GPS系统的特点有哪些?
在测绘工程中有如下优点:(1)定位精度高(2)观测时间短(3)测站间无需通视(4)可提供地心坐标(5)操作简便(6)全天候作业(7)功能多、应用广
- GPS定位系统由哪几部分组成的?各部分的作用是什么?
(1)空间部分—GPS卫星及其星座;
GPS卫星作用:
①接收地面站发来的导航电文和其他信号;
②接收地面站的指令,修正轨道偏差并启动备用设备;
③连续不断向地面发送GPS导航和定位信号。
(2)地面控制部分—地面监控系统;
地面监测系统由一个主控站、三个注入站和五个监测站组成。
a.主控站作用:①收集数据 收集本站及各监测站获得的各种数据;
②处理数据 处理收集的数据,按一定格式编制成导航电文;
③监测协调 控制和协调监测站、注入站和卫星的工作;
④控制卫星 修正卫星的运行轨道,发送启动备用设备指令。
b.监控站的作用:接收卫星信号,为主控站提供卫星的观测数据。
c. 注入站作用: 将主控站发来的导航电文注入到相应卫星的存储器中。
(3)用户设备部分—GPS信号接收机。主要作用:捕获卫星信号,(计算出测站的三维位置,或三维速度和时间)达到导航和定位的目的。
第二章 坐标系统和时间系统
1、GPS 定位对坐标系有何要求?定义一个空间直角坐标系条件有哪些?
GPS 定位对坐标系的要求
①需把卫星与地面点的位置统一在一个坐标系内;
②需采用空间直角坐标系,以便于天球与地球坐标系进行转换;
③天球与地球坐标系的建立上应具有简便的变换关系。
定义一个空间直角坐标系的条件
①坐标原点的位置; ②三个坐标轴的指向; ③长度单位。
- WGS-84空间直角坐标系的几何定义?
WGS-84坐标系的几何定义:原点位于地球的质心,Z轴指向国际时间局(BIH) 1984.0定义的协议地球极(CTP,Conventional Terrestrial Pole)方向,X轴指向相应零子午面和赤道的交点(经度零点),Y轴与Z、X轴构成右手坐标系。
- 简述定义时间系统和时间尺度的条件分别是什么?
定义时间系统的条件 ①尺度(时间单位)②原点(历元)
定义时间尺度的条件 ①周期运动;②该周期是连续稳定的;③该周期可被观测和实验复现。
第三章 卫星运动基础及GPS卫星星历
1、开普勒轨道6参数分别是什么?各参数的作用?
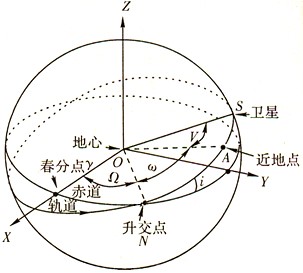 ①轨道椭圆长半径a ②轨道椭圆第一偏心率e
①轨道椭圆长半径a ②轨道椭圆第一偏心率e (a ,e 确定轨道椭圆形状和大小)
③升交点赤经Ω
(升交点与春分点所对应的地心夹角称升交点赤经。
卫星由南向北运行与地球赤道面的交点称升交点。)
④轨道面倾角i 卫星轨道平面与地球赤道面之间的夹角
(Ω , i 确定了卫星轨道平面与地球体之间的相对定向。)
⑤近地点角距ω 在轨道平面上近地点与升交点所对应的地心夹角
(ω确定轨道椭圆在轨道平面上的定向)
⑥真近点角V 卫星与近地点所对应地心夹角,是时间的函数。
(v确定卫星在椭圆上瞬时位置)
第四章 GPS卫星的导航电文和卫星信号
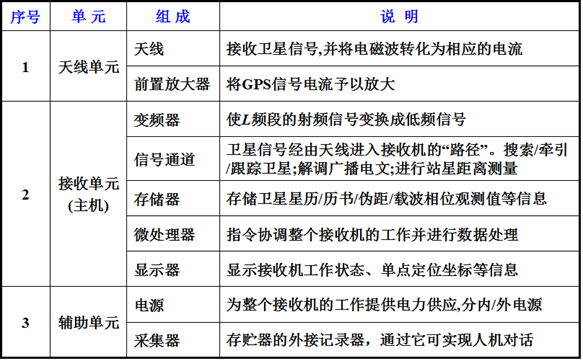
1、简述GPS接收机由哪几个单元组成的?各单元的作用?
用于测绘的GPS接收机一般由天线单元、接收单元(主机)和辅助设备组成。
第五章 GPS卫星定位基本原理
1、试述GPS测距和单点定位原理?写出方程式。
 GPS测距基本原理:设想在卫星上无线电信号发射机在卫星钟的控制下,按预定的方式发射测距信号,在地面待定点上安置信号接受机,在接收机钟的控制下,测得信号到达接收机的时间差(Δt),进而求出站星之间的距离(ρ):
GPS测距基本原理:设想在卫星上无线电信号发射机在卫星钟的控制下,按预定的方式发射测距信号,在地面待定点上安置信号接受机,在接收机钟的控制下,测得信号到达接收机的时间差(Δt),进而求出站星之间的距离(ρ): 式中,vt为卫星钟差,随导航电文得到;vT为接收机钟改正数,作为未知变量,定位时一并求解, c为电磁波传播速度。
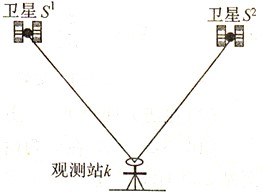
 GPS单点定位的基本原理:在待定点P 上安置GPS接收机,如果在某一时刻同时测得了四颗卫星s1、s2、s3、s4到P点的距离 则有下式成立。
GPS单点定位的基本原理:在待定点P 上安置GPS接收机,如果在某一时刻同时测得了四颗卫星s1、s2、s3、s4到P点的距离 则有下式成立。 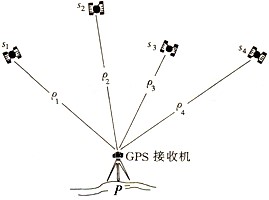
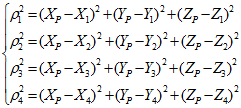 式中,坐标分别为待定点和卫星的地固空间直角坐标。求解该方程即可得到定点P 的坐标。
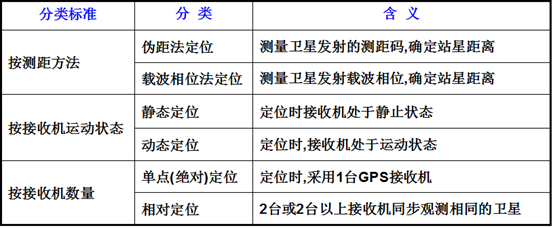
式中,坐标分别为待定点和卫星的地固空间直角坐标。求解该方程即可得到定点P 的坐标。 - 按不同分类标准GPS定位可分为哪些?
- 主动式测距和被动式测距的优缺点分别是什么?
现代光电技术测距按是否发射电波分主动式和被动式两种方式。
①主动式测距 如电磁波测距仪,测得往双程距离。
优点:不要求仪器钟必须和某一时间系统保持一致;
缺点:用户要发射信号,对军事用户难以隐蔽自己。
②被动式测距 如GPS测距,测得单程距离。
优点:用户无需发射信号,随时接收,因而便于隐蔽自己;
缺点:要求接收机钟和各卫星钟都要和GPS时间系统保持同步。
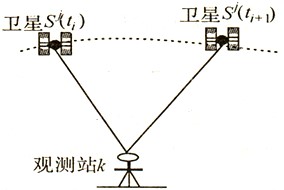
- 简述多普勒三次差分法中的一次差分分别在哪些观测值间求差?并消除或减弱了哪些误差的影响?
在卫星间求差分
(星际差分)
星际一次差分消除了接收机钟差, 也削弱电离层、对流层误差影响。
在观测站间求差分
(站际差分)
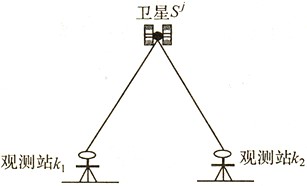
站际一次差分消除了卫星钟差,同时也削弱了电离层、对流层误差影响。
在历元间求差分
(历元差分)
历元间一次差分消除了卫星和接收机钟差,同时也削弱了电离层、对流层误差影响。特别注意的是还消除了初始整周未知数N。
- 产生周跳的原因有哪些?
①信号被遮挡,导致卫星信号无法被跟踪
②仪器故障,导致差频信号无法产生
③卫星信号信噪比过低,导致整周计数错误
④卫星瞬时故障,无法产生信号
- SA和AS技术的目的是什么?实施SA和AS技术后对定位有何影响?
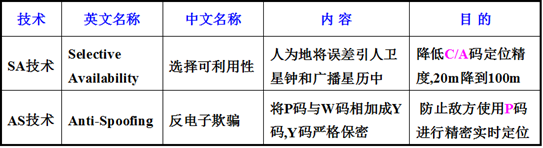
SA和AS技术对定位的影响
①降低单点定位的精度;②降低长距离相对定位的精度;③给整周未知数的确定带来不便。
第六章、GPS卫星导航
1、简述导航的三要素分别是什么?
①起始点和目标点的位置
②航行体的即时位置
③航行体的瞬时速度、姿态等状态参数
- 简述GPS导航和惯性导航各自的优缺点?
GPS导航 (1)优点 全球性、全天候、 高精度、三维实时等
- 缺点 ①星座不完善 卫星星座覆盖不完善,存在着"间隔区";
②受机动干扰 GPS接收机的工作受飞行器机动的影响,会定位失锁;
③数据更新率低 高速飞行器,难以满足实时控制的要求。
惯性导航系统(Inertial Navigation System,INS)
(1)优点 ①不依赖于外部信息; ②不向外部辐射能量(隐蔽性好);
③不受外界干扰; ④可全天侯、全球性工作;
⑤连续性好且噪声低; ⑥数据更新率高、短期精度好
(2)缺点 ①定位误差随时间而增大; ②初始化时间长
③不能给出时间信息; ④设备昂贵
- 简述GPS/惯导综合导航系统的优点?
①克服了各自的缺点,导航精度高于两个系统单独工作的精度;
②有效地提高惯导系统的性能和精度;
③提高GPS接收机跟踪卫星的能力及抗干扰性。
第七章、GPS测量的误差来源及其影响
1、GPS测量与卫星、信号传播、接收机有关的误差分别有哪些?相应的消减措施有哪些?
与卫星有关的误差
卫星星历误差
①建立卫星跟踪网独立定轨
②相对定位
卫星钟误差
①导航电文给出参数改正 经钟差改正后, 引起的等效距离偏差不超过6m 。
②相对定位
相对论效应
事先将卫星钟的频率减小约 0.00455Hz。使其进入轨道受相对论效应影响后,恰与标准频率 10.23MHz 相一致。
与信号传播有关的误差
电离层折射
①双频接收 ②相对定位 ③利用改正模型
④选择有利的观测时间
对流层折射
①模型改正 ②相对定位
多路径误差
①选择合适的站址
②设置适宜的高度截止角
③对天线设置抑径板 阻止来自地面反射的信号。
与接收机有关的误差
接收机钟误差
①独立未知数法 ②相对定位
天线相位中心位置误差
使用同一类型的天线同向安置同步观测, 在相距不远的测站间可通过观测值求差来减弱相位偏移的影响。
天线安置误差
在精密定位时,必须仔细操作,以尽量减少这种误差的影响。在变形监测中,应采用有强制对中装置的观测墩。
- 简述狭义相对论和广义相对论效应使卫星钟发生何种变化?
 (1)狭义相对论效应:一个频率f 为的振荡器安装在速度为v的载体上,由于载体的运动,相
(1)狭义相对论效应:一个频率f 为的振荡器安装在速度为v的载体上,由于载体的运动,相 对于静止的振荡器来说将产生频率变化,其改变量为:
结论:狭义相对论效应使卫星钟比静止在地球上的同类钟走得慢了。
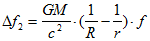 (2)广义相对论效应:处于不同重力等位面振荡器,其频率将由于重力位不同而发生变化。
(2)广义相对论效应:处于不同重力等位面振荡器,其频率将由于重力位不同而发生变化。 卫星钟与地面钟相比处于较高的引力位,其改变量为:
结论:广义相对论效应使卫星钟比静止在地球上的同类钟走得快了。
总影响:顾及r、R、v、 、f、c、GM 的具体数值,
 相对论效应总影响约为:
相对论效应总影响约为: 第八、九章、GPS测量的设计与实施
1、GPS网基准设计的内容有哪些?基准设计应注意的问题有哪些?
基准设计的内容
①方位基准:一般以给定的起算方位角值确定(如2个起算点);
②尺度基准:一般由电磁波测距边确定,也可由起算点间的距离确定;
③位置基准:一般都是由给定的起算点坐标确定。
基准设计注意的问题
①起算点个数和精度要求 起算点个数一般要求3个,且使新建的GPS网不受起算点精度较低
的影响。
②起算点边长 起算点间要适当地构成长边图形。
③GPS高程测量 网中1/3点应联测水准高程,且应均匀分布。
④独立坐标系测量 采用独立坐标系,还应该了解:参考椭球;中央子午线经度;坐标加常数;坐
标系投影面高程及测区平均高程异常值;起算点的坐标值等。
- GPS网形设计原则是什么?
①便于常规测量应用- GPS网点间虽不要求相互通视,但要考虑到常规测量应用,因此一般要求每
个点应有一个联测通视方向。
②坐标系统一致性-充分利用测区原有控制点,使新建的坐标系统与原有坐标系统保持一致。
③构成闭合环路-由非同步观测边构成闭合或附和线路。
- 同步网间的连接方式有哪些?各自的特点及适应的情况?
点连接
特点:连接效率高,当接收机数目较少(2、3台),为推荐的连接方式;但
图形强度较弱,极少有非同步闭合条件。
边连接
特点:比点连接效率低,但可靠性高, 在精确测量或接收机数较多(4台
以上)时,主要连接方式。
网连接
特点:强度和可靠性高,但效率较低,接收机需4台以上,高精度测量使用。
边点混合连接
特点:灵活、可靠性好,是理想的布网观测方案。
- GPS数据处理的目的和特点?
目的:将野外采集的原始GPS数据,以最佳的方法进行平差,归算到参考椭球面上,并投影到所采用的平面(例如高斯平面),最终得到点所在坐标系的准确位置。
- 简述南方测绘GPS4.4数据处理软件" 数据处理过程?
(1)数据通讯
将接收机内采集的数据文件(例C0021631.STH)传输在计算机内。
(2)运行数据处理软件
①新建项目: 给处理的数据起文件名。
②增加观测数据文件:将待处理的观测数据文件读入软件系统中。
③基线解算:解算所有基线向量, 区分合格和不合格的基线,是数据处理的关键。
④数据录入:输入已知点坐标,给定约束条件。
⑤平差处理:进行网型无约束平差和通过已知点进行约束平差。
⑥成果输出:将文件保存或打印输出计算成果。
- 数据处理中基线不合格,重新设置历元间隔和高度截止角的原则?
(1)历元间隔的设置原则
①同步观测时间较短时,可缩小历元间隔,反之,应增加历元间隔;
②数据周跳较多时,要增加历元间隔,跳过中断的数据继续解算。
(2)高度截止角的设置原则
①当卫星数目足够多时,增加高度截止角,屏蔽低空卫星数据参与解算;
②当卫星数目不多时,降低高度截止角,让更多的卫星数据参与解算。
第十章、GPS应用
GPS可以应用在哪些方面?
军事用途:为其海、陆、空三个领域提供实时、全天候和全球性导航,并应用于情报搜索、导弹制导、核爆监测等。
民用行业:对GPS应用开发后:已广泛应用于导航、定位、地球物理研究等行业,为地理信息系统、数字地球、数字城市、全球环境、自然灾害遥感等的实时监测的提供了技术支持。
测绘行业中的应用:测量全球性的地球动态参数和全国性的大地测量控制网;建立陆地、海洋大地测量基准和海洋测量;监测现代板块运动状态和地震信息;测定航空摄影相机的瞬时位置;进行工程测量(课程研究的主要对象)等。GPS技术已渗透到测绘行业的各个技术领域,导致测绘行业一场深刻的技术革命。
其他:精细农业;遥感;卫星定轨;资源勘探;旅游探险
名词解释:
春分点 :当太阳在黄道上从天球南半球向北半球运行时,黄道与天球赤道的交点(从北向南的交点为秋分点)。
真近点角:在轨道平面上卫星与近地点所对应地心夹角。
升交点赤经: Ω 升交点与春分点所对应的地心夹角称升交点赤经。
近地点角距:ω 在轨道平面上近地点与升交点所对应的地心夹角。
卫星无摄运动:假设地球为匀质球体,其质量集中于球体的中心,这时由地球引力所决定的卫星运动,称为无摄运动。
卫星星历: 描述卫星运行轨道和状态的各种参数值,是计算卫星瞬时位置的依据,实质就是赋值后的轨道参数。
广播星历:由接收导航电文获得的卫星星历,也称作预报星历。
导航电文:是利用GPS进行定位和导航的数据基础,包含卫星星历、时钟改正、电离层延迟改正、卫星工作状态信息以及由C/A码捕获P码信息等。
伪距:由卫星发射的测距码信号到达GPS接收机的传播时间乘以光速所得到的站星距离。
伪距测量:通过测定测距码得到站星距离的方法。
载波相位测量: 把测定载波传播的时间t,转化为测定载波传播过程中经历的相位移Φ,通过时间和相位移之间的关系,最终达到测距目的。
绝对定位:又称单点定位,确定待定点在WGS-84坐标系中的绝对位置。
相对定位:定位时,采用2台或2台以上接收机,同步观测相同的GPS卫星,确定接收机天线之间的相对位置。
静态定位:
动态定位:
基线:两测量点之间的连线,在此2点上同步接收相同的GPS卫星信号,并采集其观测数据。
观测时段:测站上开始接收卫星信号到观测停止,连续工作的时间段。
同步观测:两台或两台以上接收机同时对同一组卫星进行的观测。
同步观测环:三台或三台以上接收机同步观测获得的基线向量构成的闭合环,简称同步环。
异步观测环:在构成多边形环路的所有基线中,只要有非同步观测基线向量,则该多边形环路叫异步观测环,简称异步环。
独立观测环: 由非同步观测获得的基线向量构成的闭合环。